こんにちは、トロボです。
前回の記事で、最大モータの定格出力が80Wであることを境に「産業用ロボット」や「協働ロボット」の扱いが異なるということを書きました。今回は、いったいどこにそのようなことが書いてあるのか、エビデンスを探してみたいと思います。
まず、「産業用ロボット」とは何かということですが、公的な文書としては、労働安全衛生規則(労働安全衛生法に基づく実施規則として定められた厚生労働省令)に定義されています(同規則は略して「安衛則」とも呼ばれます)。
労働安全衛生規則 第三十六条 第三十一号
マニプレータ及び記憶装置(可変シーケンス制御装置及び固定シーケンス制御装置を含む。以下この号において同じ。)を有し、記憶装置の情報に基づきマニプレータの伸縮、屈伸、上下移動、左右移動若しくは旋回の動作又はこれらの複合動作を自動的に行うことができる機械(研究開発中のものその他厚生労働大臣が定めるものを除く。以下「産業用ロボツト」という。) 以下略
研究開発用のものは産業ロボットではないのですね。では、厚生労働大臣が定めるものとは何でしょう。
労働安全衛生規則第三十六条第三十一号の規定に基づき厚生労働大臣が定める機械を定める告示
労働安全衛生規則第三十六条第三十一号の厚生労働大臣が定める機械は、次のとおりとする。
一 定格出力(駆動用原動機を二以上有するものにあつては、それぞれの定格出力のうち最大のもの)が八〇ワツト以下の駆動用原動機を有する機械
二 固定シーケンス制御装置の情報に基づきマニプレータの伸縮、上下移動、左右移動又は旋回の動作のうちいずれか一つの動作の単調な繰り返しを行う機械
三 前二号に掲げる機械のほか、当該機械の構造、性能等からみて当該機械に接触することによる労働者の危険が生ずるおそれがないと厚生労働省労働基準局長が認めた機械
80Wの話が出てきましたね。ついでに動作の単調な繰り返しを行う機械も産業用ロボットではないようです。前回も書きましたが、産業用ロボットでなければ、安衛則の第百五十条第三号~第百五十一条に定める教示や点検に関する規則に従う義務はないため、法的な縛りが緩くなるというメリットがあります(もちろん、あくまで安衛則においては、ということですが)。
では、産業用ロボットを協働ロボットとして使用するための要件はどのように示されているのでしょうか?
少し回りくどくなりますが、安衛則の第百五十条第四号に次のような記述があります。
事業者は、産業用ロボツトを運転する場合(教示等のために産業用ロボツトを運転する場合及び産業用ロボツトの運転中に次条に規定する作業を行わなければならない場合において産業用ロボツトを運転するときを除く。)において、当該産業用ロボツトに接触することにより労働者に危険が生ずるおそれのあるときは、さく又は囲いを設ける等当該危険を防止するために必要な措置を講じなければならない。
ここで柵の話が出てきましたね。ロボットに危険性がなければ「さく又は囲いを設ける等」は必要なく、危険性があるなら「さく又は囲いを設ける等」が必要ということです。実はこの「等」が重要になってくる訳でして、産業用ロボットに係る労働安全衛生規則第150条の4の施行通達の一部改正についての別紙にて以下のように示されています。
(3) 「さく又は囲いを設ける等」の「等」には、次の措置が含まれること。
(中略)
ホ 国際標準化機構(ISO)による産業用ロボットの規格(ISO 10218-1:2011及びISO 10218-2:2011)よりそれぞれ設計、製造及び設置された産業用ロボット(産業用ロボットの設計者、製造者及び設置者が別紙に定める技術ファイル及び適合宣言書を作成しているものに限る。)を、その使用条件に基づき適切に使用すること。(以下略)
つまり、ISO 10218への適合を自己宣言すれば、柵や囲いを設けたものと同等とみなされるということになります。ちなみに、同じ文書の(2)では、リスクアセスメントを行って危険性がなくなったと評価できた際は「労働者に危険が生ずるおそれのあるとき」に該当しないものとする、とあります。つまり、リスクアセスメントによっても柵などを不要にできることが示されています。
上記をまとめると、以下のように整理できます。
・リスクアセスメントで安全確認 ⇒ 柵なしOK ⇒ 協働可
・ISO 10218 ⇒ 柵なしOK ⇒ 協働可
その後、厚労省から出されたリーフレットにも同様の記述があります。ただ、厚労省の委託事業において中央労働災害防止協会によってまとめられたガイドラインには、「ISO 10218 に適合するための前提としてリスクアセスメントを実施」(P.10)というような書かれ方がされており、そもそもISO 10218に適合するためにはリスクアセスメントが必要なので、結論として、以下のようになります。
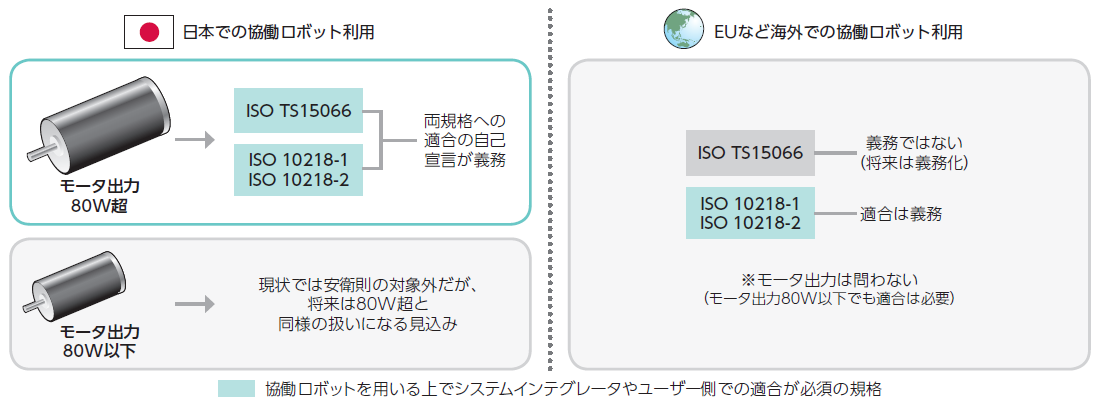
・柵なしの協働ロボットにはISO 10218への適合が必要
ここでようやく前回の記事の裏が取れました。ちなみに上のガイドラインには、「協働ロボットのうち、人との接触が発生する産業用ロボットにおいては、技術仕様書ISO/TS 15066 に適合することが必要(義務)」であることも述べられています。
では、上記議論の基礎になる安衛則を守らなかった場合にどのような罰則があるのか? これについては次回考えてみたいと思います。