
こんにちは,トロボです.
今回からは少々メカの話をさせて頂きます.
ロボットに使用される駆動部として最も主流なのが電動モータです.制御性が良く,取り扱いが容易であることがその理由ですが,一般に電動モータの出力は高速回転・低トルクです.一方,ロボットに求められるのは低速回転・高トルクである場合がほとんどであり,この性質を変換する機構が減速機です.
今回はこの減速機,中でも精密駆動ロボットによく使われる
・ハーモニックドライブ®
・サイクロ®減速機
・RV®
の3種類について,ざっくりと紹介したいと思います.
ハーモニックドライブ®
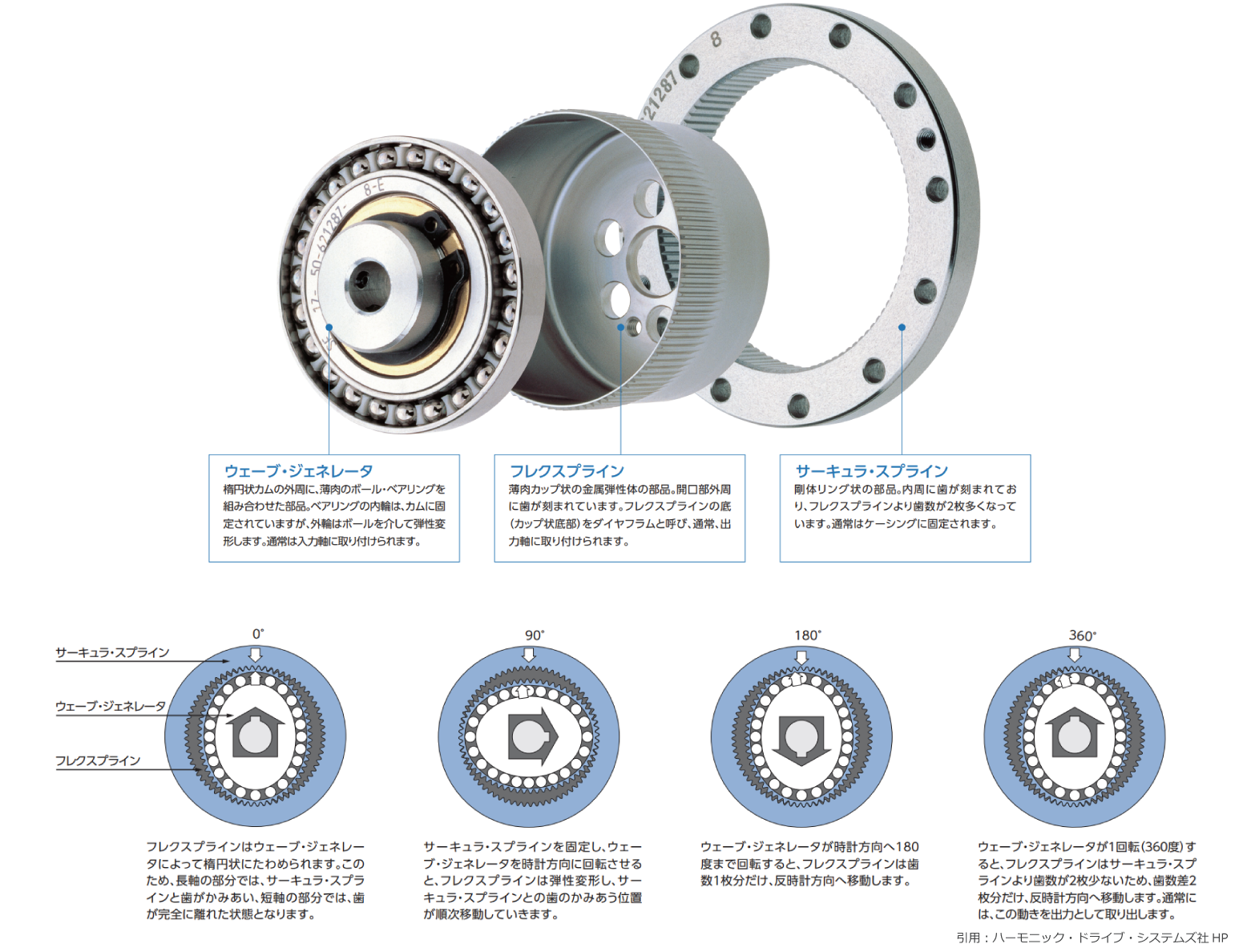
ハーモニック・ドライブ・システムズ社の製品です.一般名称としては波動歯車装置と呼ばれる,金属の弾性を利用するという特殊な減速機です.
特徴は以下
・ノンバックラッシ
ハーモニックドライブ®は歯車の噛み合いが転がりではなく,次々にくさびが押し込まれるような独特な噛み合い方式によって,ノンバックラッシを実現しています.ちなみにより一般的な減速機であるプラネタリギアは1°ほどのバックラッシがあります.
・小型軽量
たった3部品から構成されており,コンパクトな機構です.大きさの観点からハーモニックドライブ®が選定されることも多いでしょう.中空製品が揃っている点もロボットに適していると言えます.可搬重量10kg以下の小~中型ロボットによく使用されており, Torobo,ToroboArmにも多く使用されています.
サイクロ®減速機
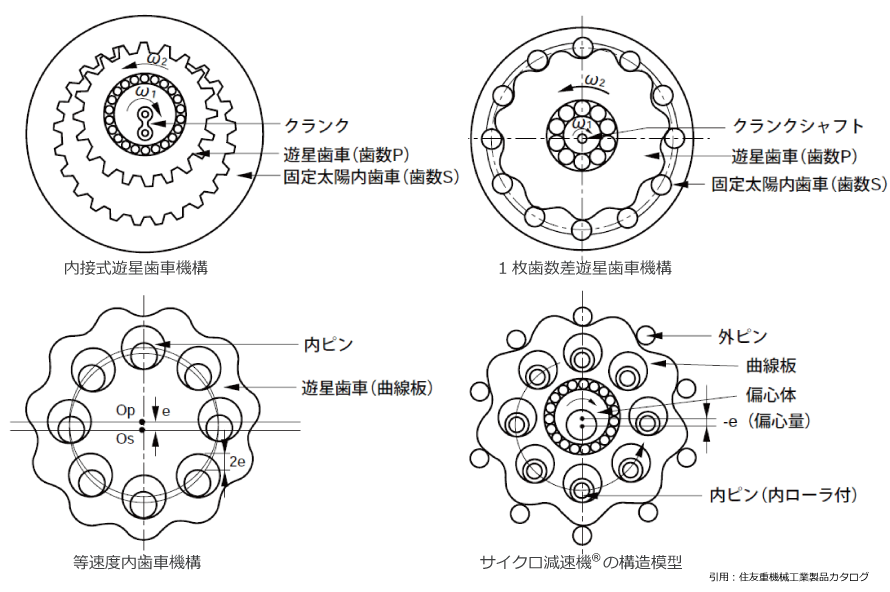
住友重機械工業社製の精密減速機です.図のように内接式遊星歯車機構と等速度内歯車機構を組み合わせた構造を持っています.偏心体を回転させることで,揺れ動く曲線板の動きを,カムを介して出力軸である内ピンに伝達しています.
特徴は以下
・ノンバックラッシ~低バックラッシ
原理的に(エピトロコイド平行)曲線板が外ピンの全てに常に接触しながら転がり接触するため,回転が滑らかで低バックラッシです.
・高剛性
上記と同じ理由により,高い出力軸の剛性を持っています.減速機に高負荷がかかった時,ねじれによる位置ずれが無視できなくなります.そのため高負荷環境下では剛性も精度に関わる重要な要素となります.
多数の部品を使用するため,ハーモニックドライブ®比較して大型となりますが,高剛性で衝撃にも強い点から,比較的大型のロボットで採用されています.
RV
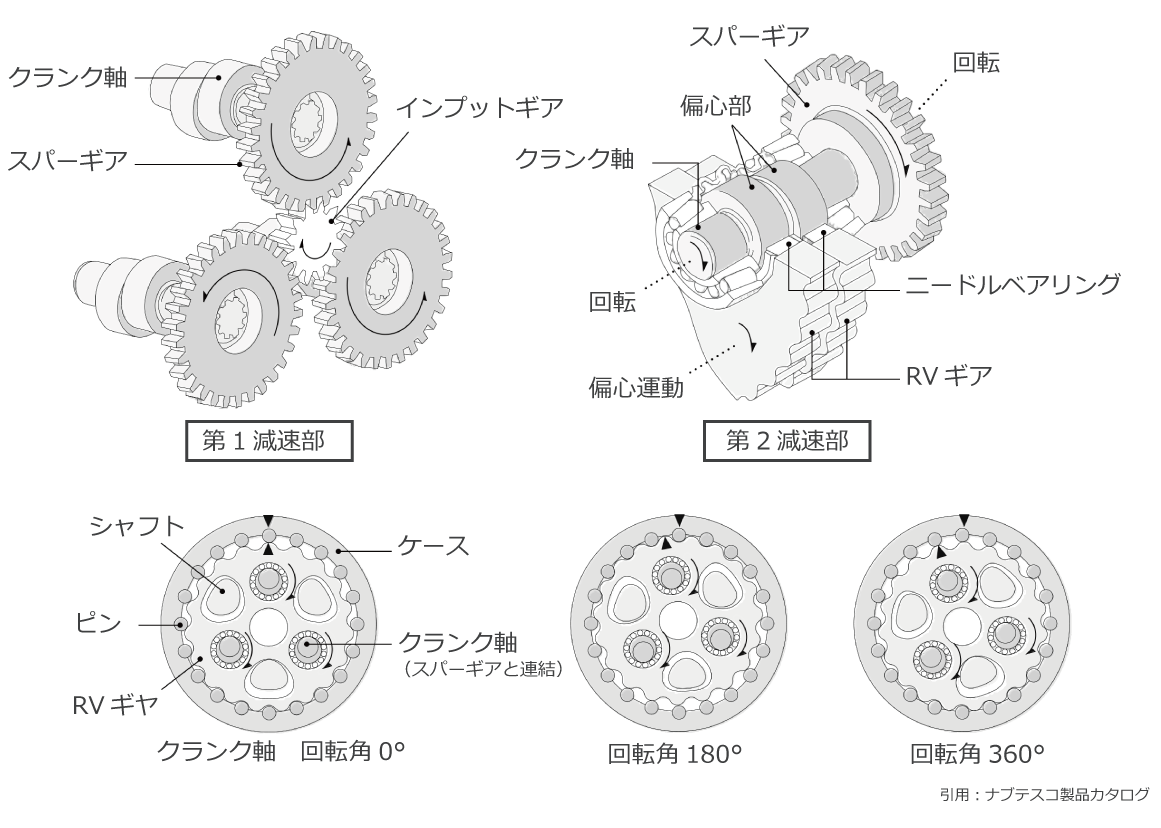
ナブテスコ社製の精密減速機です.原理としてはサイクロ®減速機と似ており,クランクシャフト(偏心部)の回転によってRVギアを揺れ動かし,カムを介して出力軸に伝達しています.
特徴は以下
・低バックラッシ
第1減速部と第2減速部の入れ子構造を持つ減速機であり,減速比はそれそれの減速比の積となります.第一減速部がプラネタリギアと同じ構造を持っているため,バックラッシが発生しますが,出力軸でのバックラッシは1/(第2減速部の減速比)となるため,結果として低バックラッシとなります.バックラッシは1[arc min]以下(RV-006E 減速比103)とのこと.
・高剛性
サイクロ®減速機と同じく,同時噛み合い数が多いため過負荷に強い構造を持ちます.
・減速比が自在
第1減速部の歯数比を変えることにより容易に減速比を変えることができます.
ロボットなど精密動作に使われる減速機として,世界シェア60%を誇ります.最も安定性と信頼性をもつ精密減速機と言えるかもしれません.
以上,精密減速機3種類についての概要でした.
基本的には
小型・・・ハーモニックドライブ®
中型~大型・・・サイクロ®減速機またはRV®
といったところでしょうか.
Toroboでは主にサイズの面から,ハーモニックドライブ®を採用しています.
次回はこのハーモニックドライブ®について,設計の視点から改めて紹介したいと思います.