
こんにちは,トロボです.
今回からは少々メカの話をさせて頂きます.
ロボットに使用される駆動部として最も主流なのが電動モータです.制御性が良く,取り扱いが容易であることがその理由ですが,一般に電動モータの出力は高速回転・低トルクです.一方,ロボットに求められるのは低速回転・高トルクである場合がほとんどであり,この性質を変換する機構が減速機です.
今回はこの減速機,中でも精密駆動ロボットによく使われる
・ハーモニックドライブ®
・サイクロ®減速機
・RV®
の3種類について,ざっくりと紹介したいと思います.
ハーモニックドライブ®
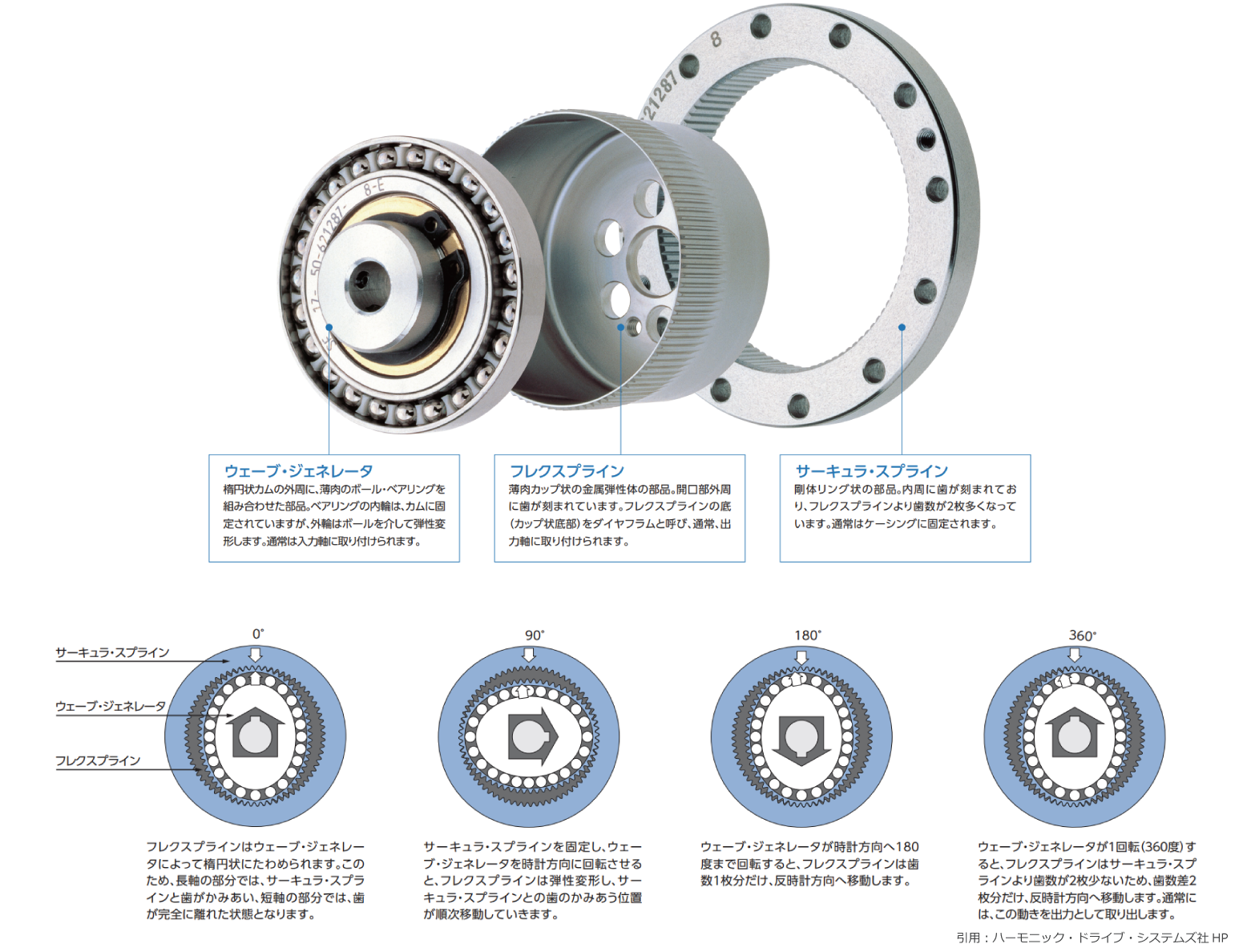
ハーモニック・ドライブ・システムズ社の製品です.一般名称としては波動歯車装置と呼ばれる,金属の弾性を利用するという特殊な減速機です.
特徴は以下
・ノンバックラッシ
ハーモニックドライブ®は歯車の噛み合いが転がりではなく,次々にくさびが押し込まれるような独特な噛み合い方式によって,ノンバックラッシを実現しています.ちなみにより一般的な減速機であるプラネタリギアは1°ほどのバックラッシがあります.
・小型軽量
たった3部品から構成されており,コンパクトな機構です.大きさの観点からハーモニックドライブ®が選定されることも多いでしょう.中空製品が揃っている点もロボットに適していると言えます.可搬重量10kg以下の小~中型ロボットによく使用されており, Torobo,ToroboArmにも多く使用されています.
サイクロ®減速機
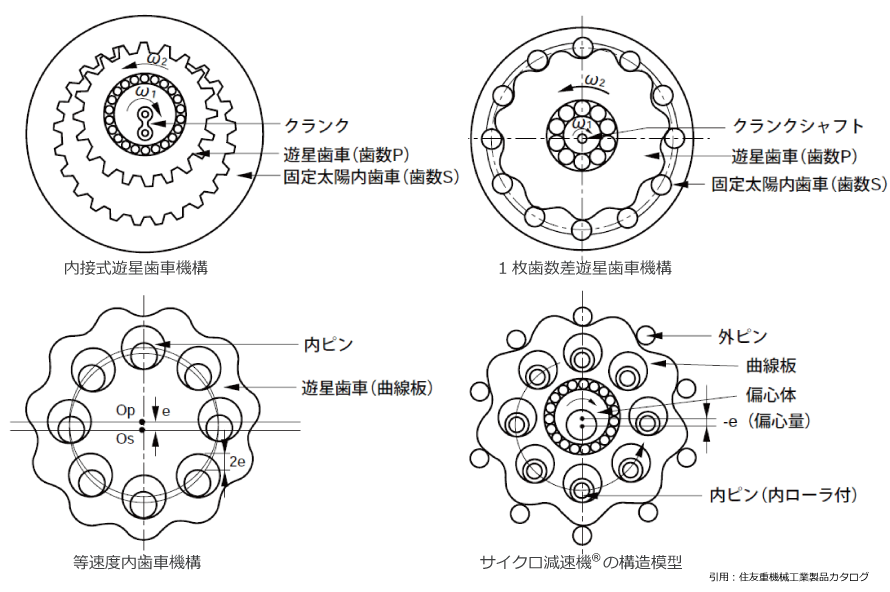
住友重機械工業社製の精密減速機です.図のように内接式遊星歯車機構と等速度内歯車機構を組み合わせた構造を持っています.偏心体を回転させることで,揺れ動く曲線板の動きを,カムを介して出力軸である内ピンに伝達しています.
特徴は以下
・ノンバックラッシ~低バックラッシ
原理的に(エピトロコイド平行)曲線板が外ピンの全てに常に接触しながら転がり接触するため,回転が滑らかで低バックラッシです.
・高剛性
上記と同じ理由により,高い出力軸の剛性を持っています.減速機に高負荷がかかった時,ねじれによる位置ずれが無視できなくなります.そのため高負荷環境下では剛性も精度に関わる重要な要素となります.
多数の部品を使用するため,ハーモニックドライブ®比較して大型となりますが,高剛性で衝撃にも強い点から,比較的大型のロボットで採用されています.
RV
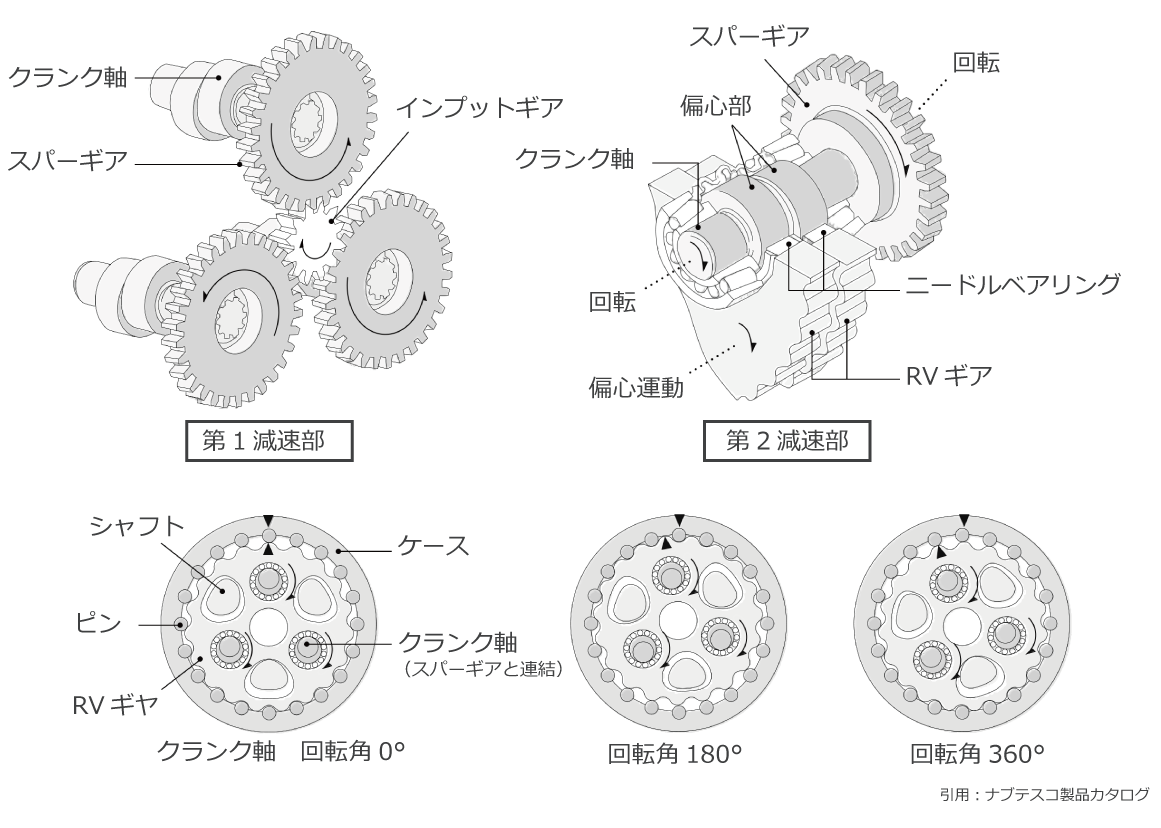
ナブテスコ社製の精密減速機です.原理としてはサイクロ®減速機と似ており,クランクシャフト(偏心部)の回転によってRVギアを揺れ動かし,カムを介して出力軸に伝達しています.
特徴は以下
・低バックラッシ
第1減速部と第2減速部の入れ子構造を持つ減速機であり,減速比はそれそれの減速比の積となります.第一減速部がプラネタリギアと同じ構造を持っているため,バックラッシが発生しますが,出力軸でのバックラッシは1/(第2減速部の減速比)となるため,結果として低バックラッシとなります.バックラッシは1[arc min]以下(RV-006E 減速比103)とのこと.
・高剛性
サイクロ®減速機と同じく,同時噛み合い数が多いため過負荷に強い構造を持ちます.
・減速比が自在
第1減速部の歯数比を変えることにより容易に減速比を変えることができます.
ロボットなど精密動作に使われる減速機として,世界シェア60%を誇ります.最も安定性と信頼性をもつ精密減速機と言えるかもしれません.
以上,精密減速機3種類についての概要でした.
基本的には
小型・・・ハーモニックドライブ®
中型~大型・・・サイクロ®減速機またはRV®
といったところでしょうか.
Toroboでは主にサイズの面から,ハーモニックドライブ®を採用しています.
次回はこのハーモニックドライブ®について,設計の視点から改めて紹介したいと思います.
材質的dにはSLD-MAGICなんかが評判のようですね。日本でしか出来ない最高の高性能特殊鋼。これはもはや日本国内の製造業の国際戦略の一部となっていますね。
しかしプロテリアルのトライボロジー効果が発現するSLD-MAGICという材料を作るとき壮絶な苦労があったと聞きます。炭素の結晶ををうまくGIC化させるためにこの特殊鋼はCuとSが添加されていました。これは、教科書的には最もやってはいけない合金設計の組み合わせです。しかしひるむことなく久保田博士はそれを敢行し、巨大な不良の山を築いたらしい。それでもあきらめず、黒字に転嫁したのはなんと6年後であったという。これは赤熱脆性とよばれ鉄鋼技術者が真っ先に嫌う現象で、赤く焼けた巨大な鉄塊が圧延や鍛造中に真っ二つに割れてゆくことである。
この原因をしぶとく究明してこの材料は実用化されたのがその舞台裏である。
すごい開発ドラマですね。なにやら鉄道の送電線のトロリ線ダイスあたりも超硬を凌駕しつつあるって聞きましたけど。
鉄鋳物関係でやたらマルチマテリアルのコア技術といっていたのはこのことか。
グラファイト層間化合物やエキソエレクトロン、極圧添加剤といってもCCSCモデルという名のお釈迦様の掌の上ちゅうこっちゃろ。
アルミのワイヤーハーネスなんかの線引きダイスへの応用なんかも考えられますね。どこかやってるかも。
ディールスアルダーってなんだ?
トヨタ関係の水素エンジンにも使われているらしいです。
CCSCモデルは画期的な境界潤滑理論だと思う。従来の極圧添加剤にない視点が盛り込まれている。
二重擬三元系状態図の機械の摩擦界面現象理論はとても独創的だとおもいます。熱力学の知識がないと理解しにくいだろうけど。
まあ、日本の独創と呼ばれているだけのことはある。特殊鋼といえばいい材料が出来れば必ず他社が相当品というものを出すが、これだけは他社相当品はない。理由は不明だが、製造性のハードルが高いことが知られていて多分他社ではできないのだと思われる。
ボストンダイナミクスの映像はとても興味深かった。
プロテリアルの経営トップはSLD-MAGIC
の開発者がふさわしいのでは。分野横断的な視点も
もってるし。
いずれにしてもトライボケミカル反応を具体的化学反応経路として提示したというのはグリーン・イノベーションに一石を投じたとみるべきでしょうね。
うちは伸線装置のパーツとしてSKD11の代わりにSLD-MAGICをPCD基材として使っているので関係ないか。