
こんにちは。トロボです。
前回は知能ロボティクスを構成する3要素のうち、Emergence(創発)を紹介しました。今回は、残りのSituatedness(立脚性)とEmbodiment(身体性)をご紹介します。
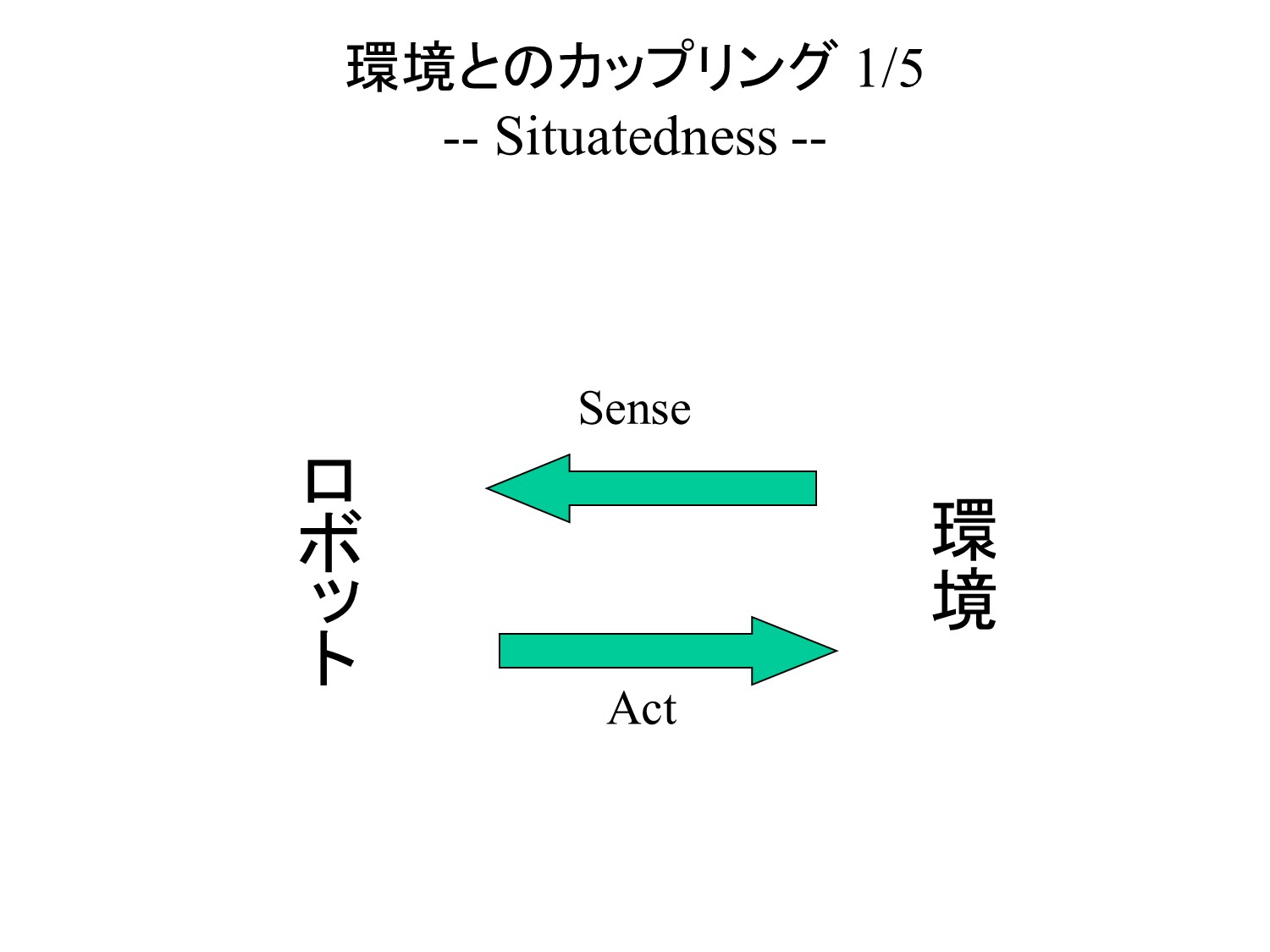
Situatedness(立脚性)という概念に関し、知能ロボティクスの分野でも定義が混乱しているようにも思えますが、こでは「センサとモータを介した環境とのカップリング(結合)」とします。
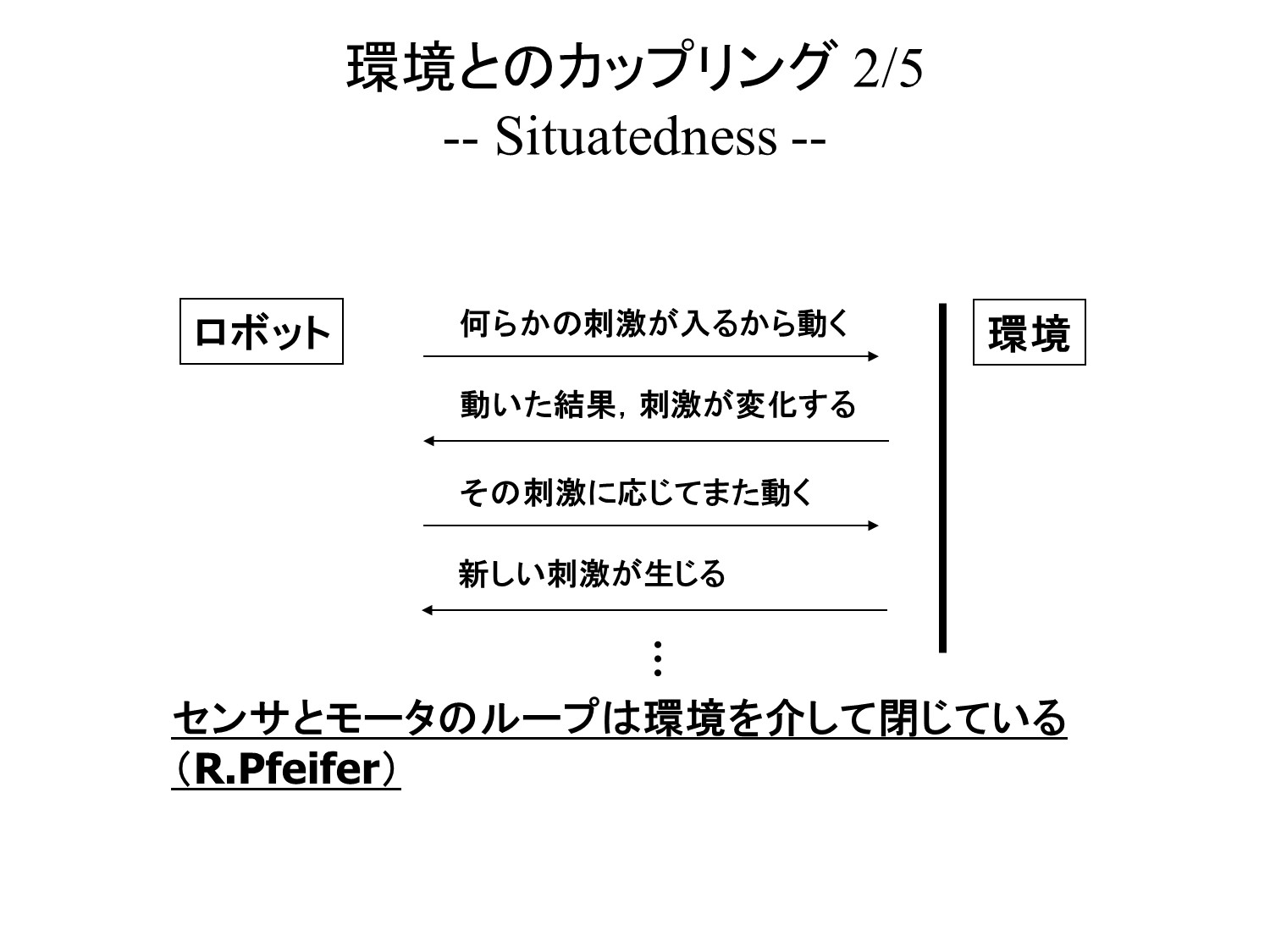
ただし、その結合度合いは、このスライドにあるように密でなければなりません。知覚して行動して終わりではなく、行動の結果が知覚に影響を与え、その知覚の結果が次の行動を引き起こすというようなループが環境を介して常に回っている必要があります。
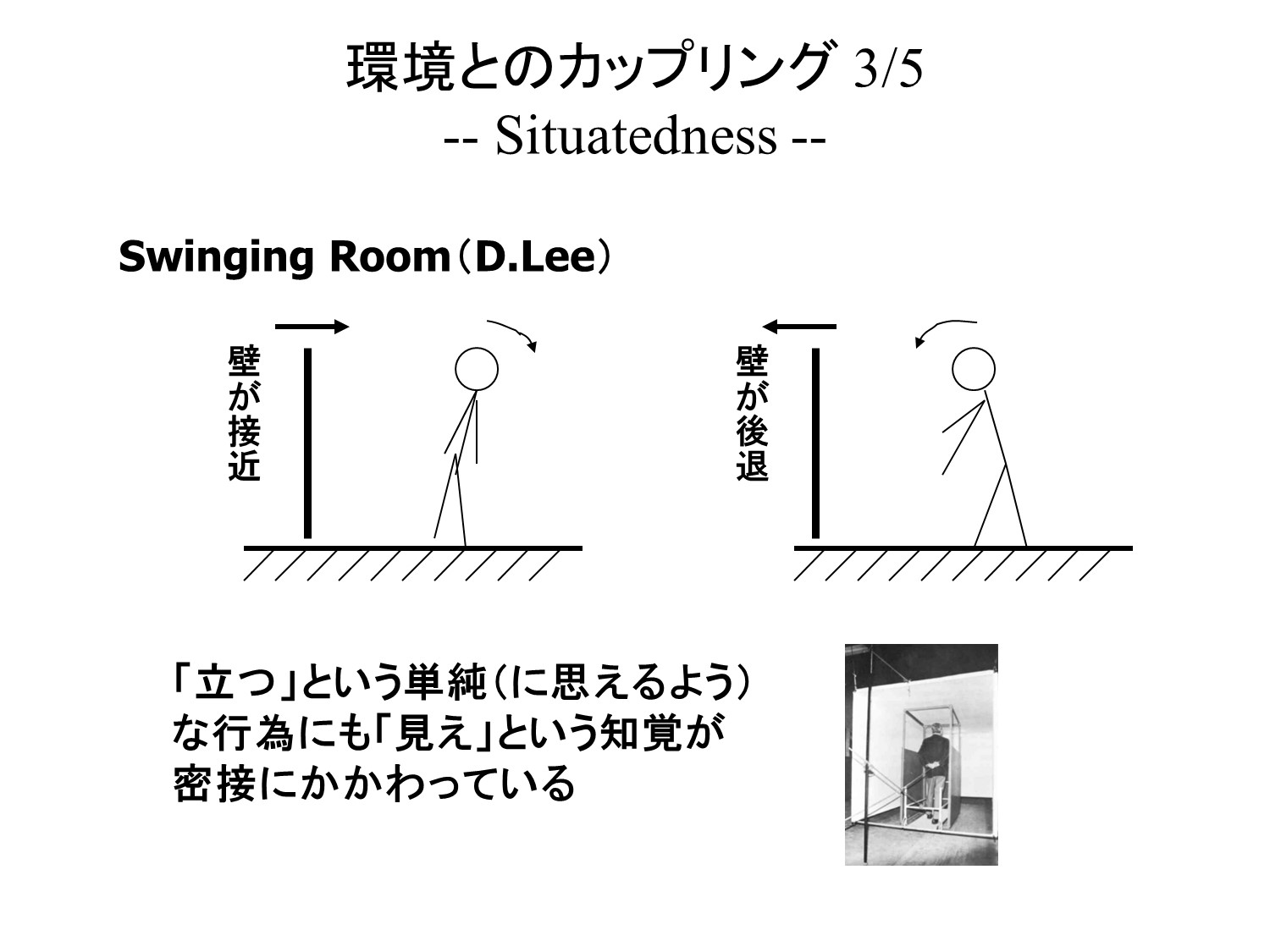
これは人間もsituateしているという一例です。人間が壁に向かって立っているとき、気づかないくらい壁を前後させると、無意識的に前のめり・後ろのめりになるという実験です。つまり「立つ」という行為は、単純に物が置いてあるのとは異なり、不断のセンサ・モータループに支えられた“積極的な行動”ということになります。

これは知覚のために行動を利用する例です。この実験は、振ることによって物の形を当てることができるというものですが、振り動作を行うことを通して慣性モーメントという不変項を知覚していると言われています。これはロボティクスの分野では「アクティブセンシング」と呼ばれ、ロボットの認識能力を向上させる手法として重要視されています。
ここで、触覚ならともかく、視覚は高次の認知機能が関わるので行動は不要だろうと思われる方もいるかもしれません。つまり網膜に映った像を解釈することで対象を認識するので、行動とは関係ないという見方です。しかし、それを否定する実験があります。これやこれは行動を通して能動的に環境を見る猫と、ゴンドラに乗って受動的に環境を見る猫の発達を比較した実験ですが、可哀想なことに後者の猫は同じ風景を見ていたにも関わらず奥行きを認知できない猫になってしまったそうです。つまり、視覚の発達においても、行動との結びつきが非常に重要ということです。
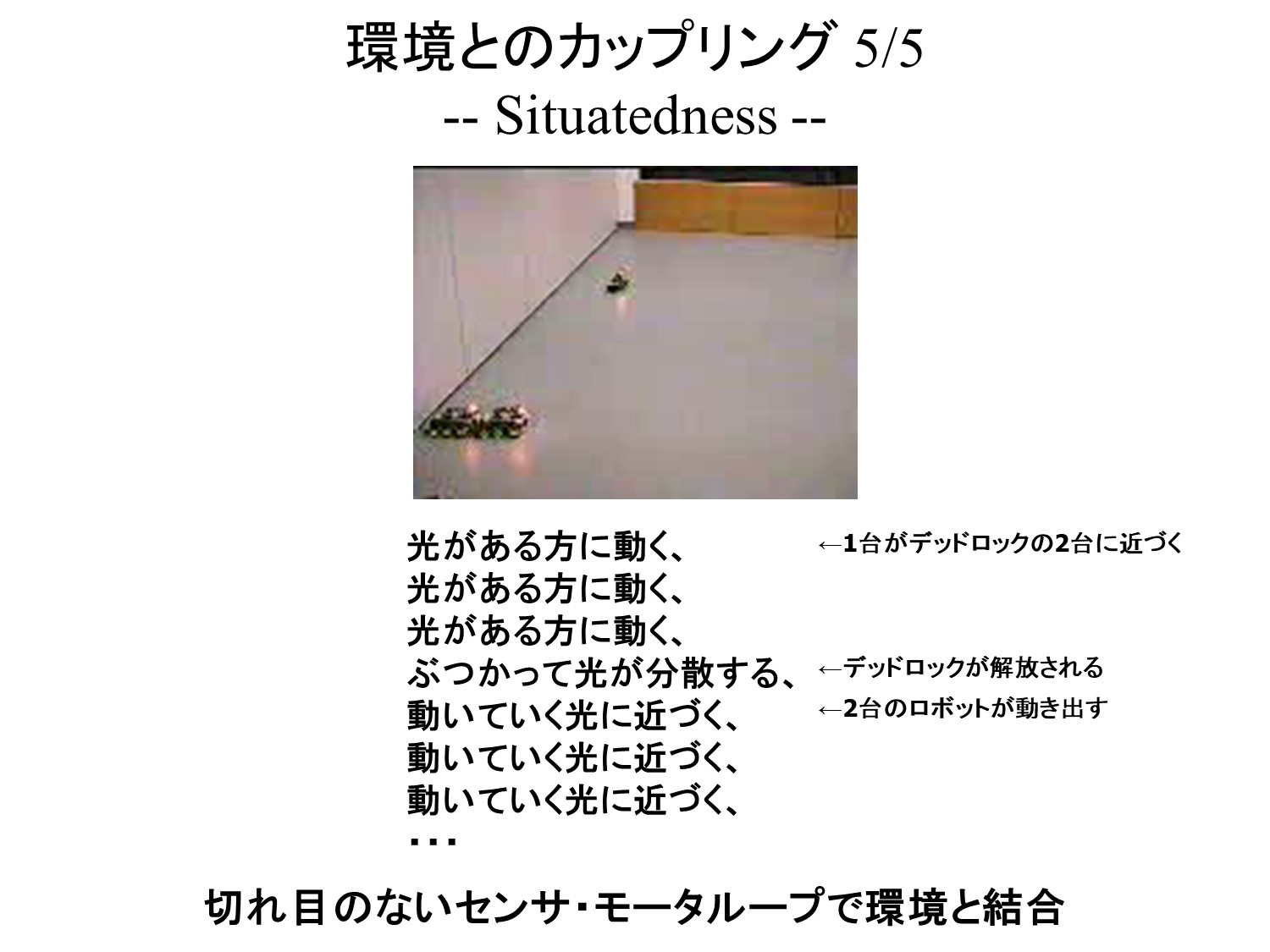
ロボットの例はないのかと思われるかもしれませんが、ビヘイビアベースドロボットは最初から環境にsituateしています。
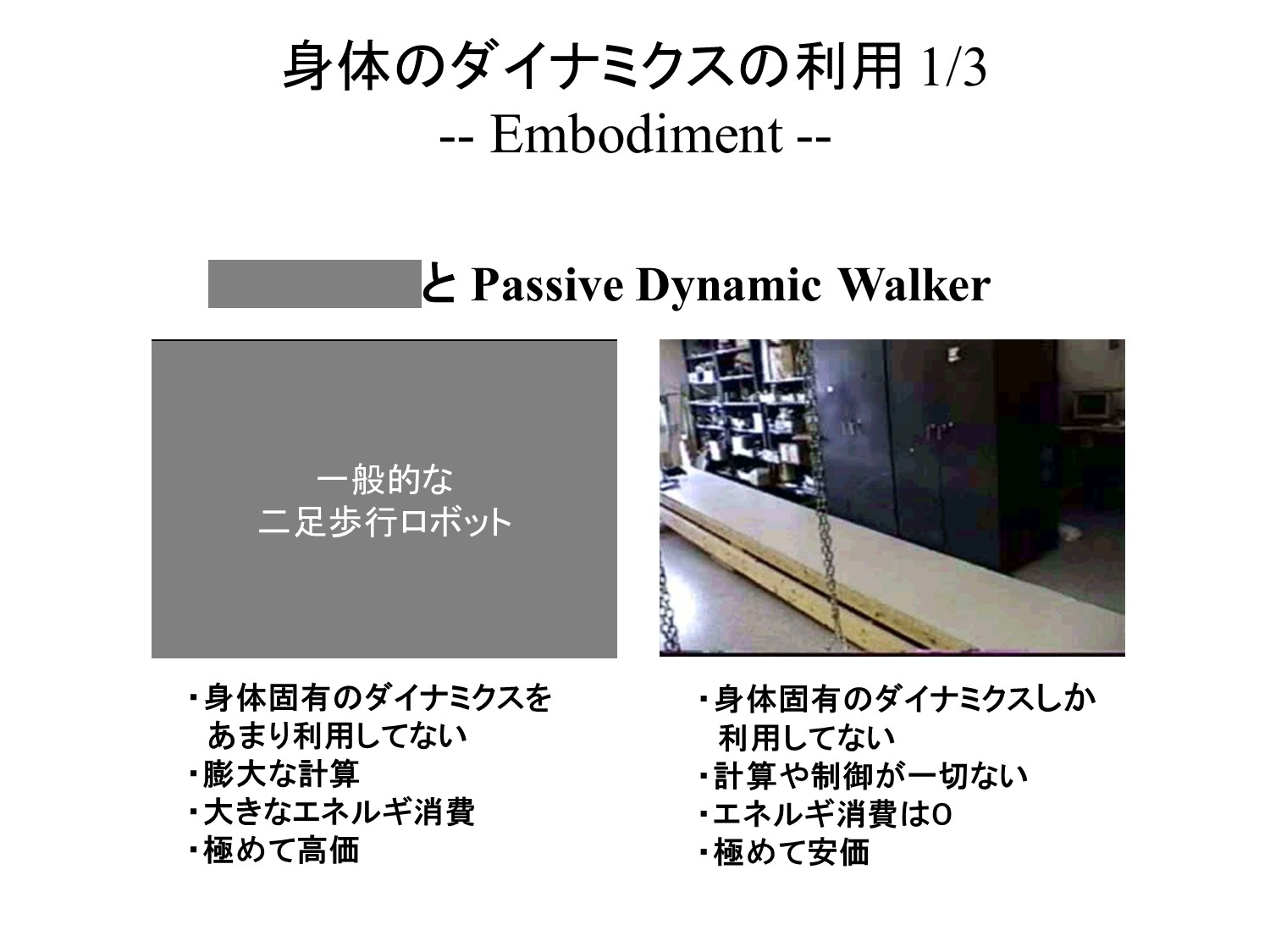
次にEmbodiment(身体性)についてお話しします。ここでのポイントは「身体の特性を活かす」ということです。皆さんが展示会等のデモで見かける多くの二足歩行ロボットは、言うなら「計算」で歩いています(物議を避けるためスライドは黒塗り)。どこに足を着けば転ばないのかを考え、そのための関節角度を計算し、モータに指令を送ることでロボットを歩かせています。その際、膝を伸ばしきってしまうと関節角度を得るための数式が解けなくなることから、多くのロボットは歩行中に常に膝を曲げています。また、これらロボットの関節はフリーで動かない(振り子にならない)ため、関節の正確な位置と速度の制御によってしか歩行できません。この時、モータは常に駆動しているので、スライドにあるようにエネルギ消費が大きい訳です。
一方、スライドの左の動画にあるPassive Dynamic Walker(受動歩行機械)は真逆の発想で設計されています。上の動画がWebに見つからないため、こちらを参照してください。脚(Leg)のダイナミクス(物理特性)と足(Foot)の構造、環境(坂の角度)の絶妙な組み合わせの中で、自然な歩行が生まれていることが分かると思います。ここにコンピュータやモータは介在していません。人間や生物の歩行も、身体のダイナミクスを用いるという意味では、こちらに近いと言えます。神経系で生成した制御リズムと脚の振り子の周期を調整しながら歩行しているものと考えられます。
ところで、脚・足・環境の相互作用で歩行が生まれることは、ある意味、先に述べたEmergence(創発)とも言えます。また、前回紹介したゴミ集めロボットは、センサがボディの斜め前についているという身体的な特徴を利用しているため、Embodimentして(身体性に基づいて)いるとも言えます。ゴミ集めロボットはセンサ・モータループを介して環境と結合していますので、当然Situate(立脚)しています。こうしたことから、創発、立脚性、身体性という概念は密接に関係していることが分かると思います。

もはや昔の話になりましたが、MITのLeg Labでは脚のダイナミクスを利用した歩行について研究を進めていました。その名もSpring Flamingoです。
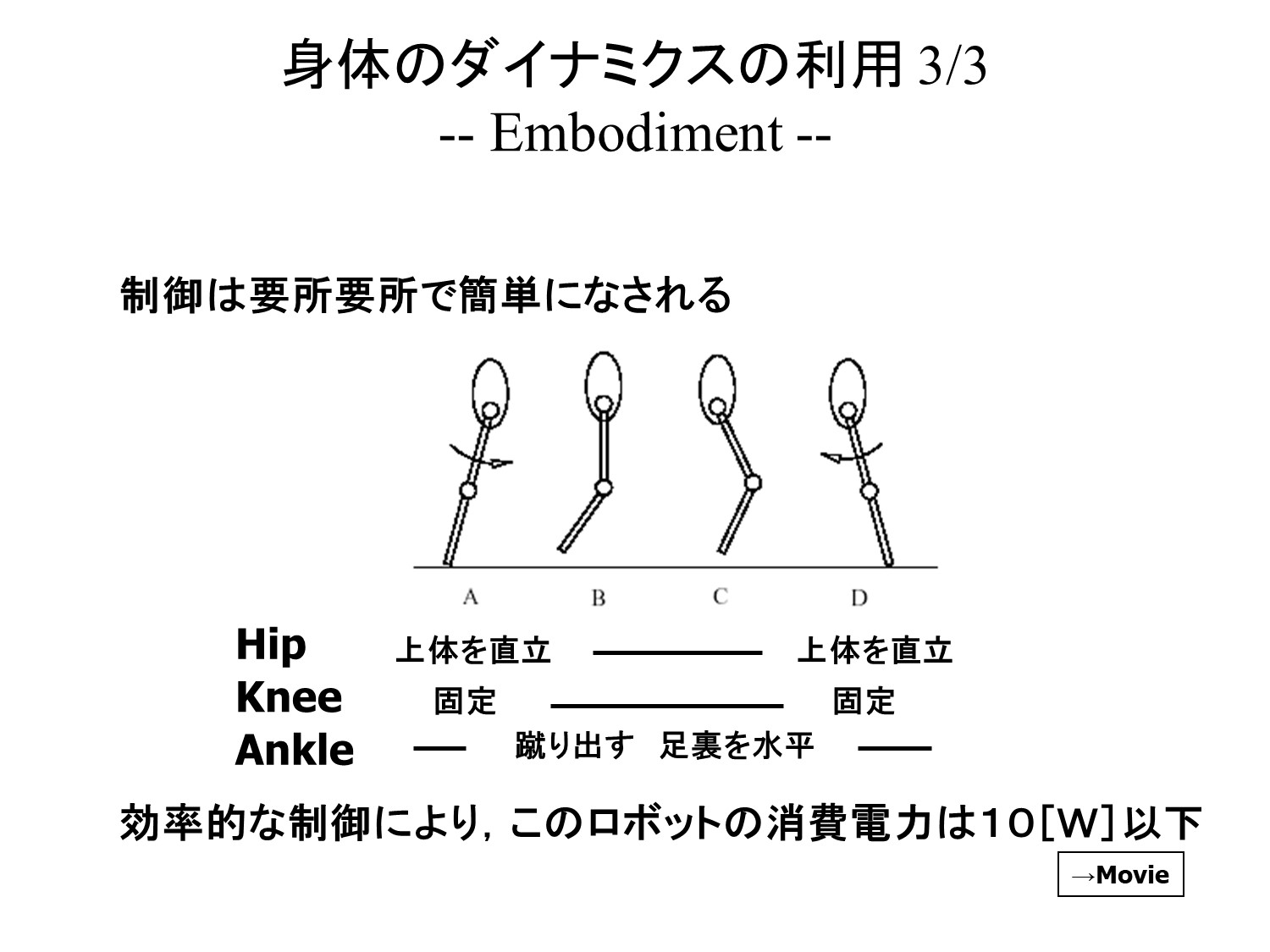
Spring Flamingoは、運動の要所要所で制御をかけることで、消費電力を低く抑えることを実現しています。これは人間や動物の歩行(それ以外の動作)でも行っていることで、非常に効率のよい制御方法と言えます。よくスポーツで「肩の力を抜け」と言いますが、省エネ・高効率の運動とは、入れるべきときに力を入れ、それ以外は身体のダイナミクスを利用することを意味しています。
ちなみにMITのLeg Labは、Boston Dynamicsの創業者であるMarc Raibertも在籍していた研究所です。彼は当時ホッピングロボットを研究しており、それが今日のBoston Dynamicsの素晴らしいロボットに繋がりました。

今回議論してきた内容は、生態心理学(Ecological Psychology)の開祖であるJames J. Gibsonが提唱したアフォーダンス理論と非常に親和性が高いものです。Gibsonは、環境を無味乾燥な入れ物ではなく、生物に行動の可能性を与えるアフォーダンスで満ちているものと考えました。生物の行為は、自分が環境内を動いているのか環境に動かされているのか、その両方が真となるような、環境との密接なカップリングのもとに成り立ちます。この時、生物にとっての世界の「意味」や「情報」というものは、環境との相互作用という動的過程における変化するもの・しないものから見出されます。
Gibsonは「自己(意識)」については言及していないかもしれませんが、アフォーダンスの考え方をベースにすると、当然ながら自己も環境(およびインターフェイスとしての身体)と切り離せないものになるはずです。このように、アフォーダンス理論もまたデカルト的心身二元論を超えるものであり、本稿で紹介した知能ロボティクスの考え方と共鳴するものであることは明らかです。
・・・
既にお気づきの方も多いと思いますが、ここで紹介した内容は、Rolf Pfeifer教授とChristian Scheier博士が著した「知の創成」をベースにしているところがあります。この本は私の青春時代の研究活動におけるバイブルでもありました。発刊から20年以上経ち、徐々に古典になりつつありますが、知能ロボティクスの分野においては今でもなお必読の書と言えます。
次回は、知能ロボットの3要素である創発、立脚性、身体性というコンセプトを維持したまま、ロボットの知能をさらに高度化する方法についてご紹介します。