
こんにちは、トロボです。大変お久しぶりです。
本記事ではTorobo Armによる唐揚げピッキングデモをご紹介します。以前のブログで不定形物ピッキングについてお話ししましたが、今回は少し違った技術アプローチになっています。
まずは以下の動画をご覧ください。アームが動きを止めることなくスムーズにピッキング動作を実行できていることが分かります。
この唐揚げピッキングシステムの概要について、本記事を含めて3回にわたってお送りします。今回はシステムについてご説明したいと思います。
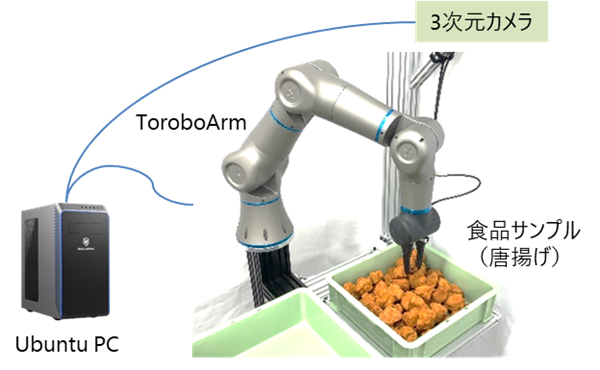
構成としてはシンプルで、ロボットアームはTorobo Armを用い、Ubuntu環境でROSによってTorobo Armと3次元カメラを連携させています。3次元カメラはロボットの手先につけるのではなく、唐揚げの入った箱の直上に固定設置しています。手先にカメラをつけた場合、自在にセンシング位置を変更できるメリットがある反面、センシングの際にロボットアームを完全に停止させなければならないデメリットもあります。今回はなるべく素早いピッキングを実現するために、固定設置の運用でデモシステムを構築しました。手元がセンサ配線で込み合わないので、よりスマートに見えますね!
デモで使用しているのは本物の唐揚げではなく、樹脂で作られた食品サンプルです。一つ一つ実物から型を取り、職人さんが着色していますので、遠目からは本物と区別がつかないほど。実際の唐揚げに近づけるため、掴むと柔らかく変形するつくりになっています。

ちなみに食品工場の現場では人が両手で作業してタクトタイム(1回のタスク実行に要する時間のこと)が2秒、片腕あたり4秒で作業をしなければならないと言われています(注:筆者がヒアリングした特定の現場における大まかな目安)。唐揚げピッキングであれば、一つの唐揚げをピッキングして指定の場所に置く動作を4秒でこなす必要があるということになります。
今回のデモではタクトタイム4秒とまではいきませんが、動作シーケンスを高速化するような工夫をいくつか組み込んでいます。その一つが、前述した固定設置タイプの利点を生かした最適なタイミングでのセンシングです。手先カメラの場合は、把持する前にセンシングしてターゲットを認識、そこからようやく把持動作に移るためタイムラグが生じます。一方で、固定設置の場合は下記の図のようなタイミングでセンシングを行います。
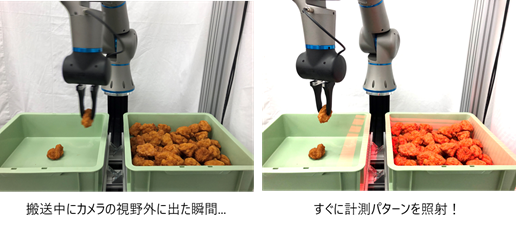
アームが動いている最中にセンシングしているのがお分かりいただけるでしょうか?センシングして得られたデータ(カラー画像やデプス画像)は即座に認識処理モジュールに送られ、唐揚げの認識が行われます。もちろん認識処理を実行している間もアームの動作が並行して行われますので、把持したターゲットを搬送し終えてアームが戻ってきたときには、次のターゲットの把持位置まで計算完了しています。したがってアームの動きを止めることなく、即座に次のピッキング動作に移ることができる、というわけです。
さて、今回はTorobo Armと固定設置した3次元カメラを使った唐揚げピッキングデモにおける、動作シーケンスを高速化するちょっとしたテクニックをご紹介しました。本デモは、サイエンスライター森山和道氏が講師を務めたWebセミナー「飲食・食品業界におけるロボット活用の現状と展望」(2020/12/8開催)においてもご紹介いただいています。
第2回は唐揚げの認識処理についてご紹介しようと思います。
それではまた。