
こんにちは、トロボです。
本記事では、3/9-12に開催の展示会FOODEX JAPAN2021に出展する唐揚げピッキングロボットを、展示会に先駆けてご紹介します。まずは動画をご覧ください。
タクトタイムは2.2~2.7秒となっており、1時間当たり最大1600個をピッキングできる計算です。バラ積みピッキングのデモとしては他に類を見ない速度と言えます。また、実際に1500回ピッキングさせた実験での成功率は98.5%と、速度だけでなく正確性も兼ね備えています。
ロボットシステムの構成は下記の図のようになっています。
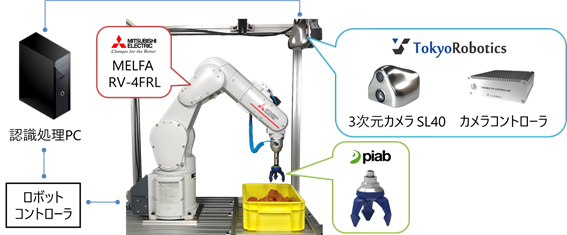
今回は動作速度を重視したピッキングを実現するために産業用ロボットを使用しています。産業用ロボットには三菱電機のMELFA RV-4FRL、3次元カメラは自社製のSL40、エンドエフェクタはpiab社のソフトグリッパを採用しています。
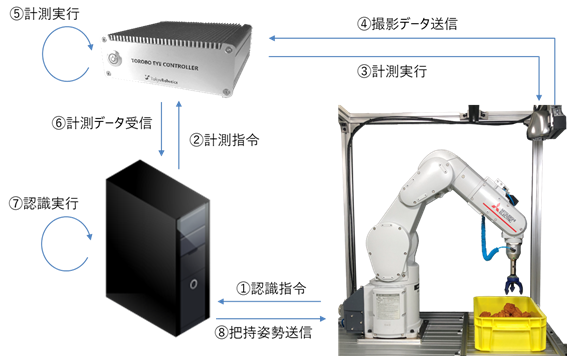
今回のシステムでは、ロボットの動作はメーカ純正のロボット言語(MELFA Basic VI)でプログラミングされています。三菱電機のロボットコントローラCR800には外部機器と通信する機能が搭載されているので、それを用いて認識処理PCと連携しています。認識処理PCはロボットコントローラから認識実行指令を受信したらSL40に計測指令を送信、計測結果を受け取って唐揚げの認識処理を実行してロボットがとるべき把持姿勢の計算結果をロボットコントローラに送信します。
ここで、ロボットと3次元カメラの位置関係が厳密に分かっていないと正確な把持姿勢を計算することができません。ロボットと3次元カメラの位置姿勢の関係を取得するための校正作業、いわゆるハンドアイキャリブレーションが必要です。そこでロボットにマーカーを持たせていろいろな姿勢を取らせ、3次元カメラSL40でそれぞれの姿勢における画像を撮影します。
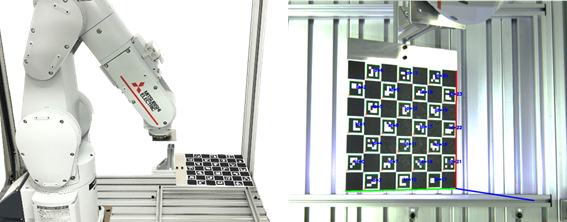
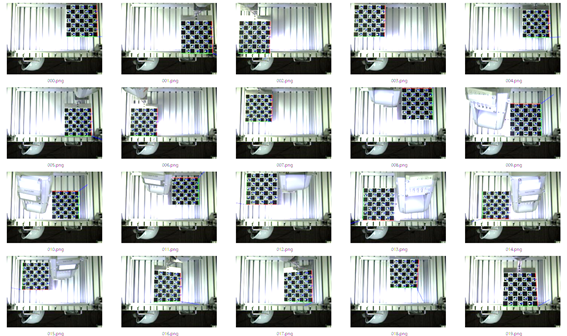
ロボット位置姿勢と、そのときのSL40から見たマーカーの位置姿勢とを紐づけて記憶しておき、最適化計算によって誤差最小となる3次元カメラとロボットの相対位置姿勢を推定します。今回のシステムでは20枚分の撮影データを用いました。計算されたキャリブレーション結果は認識処理PCの内部に保存され、把持姿勢の計算の際などに使用されます。
なお、この「ハンドアイキャリブレーション」は呼び方が諸説あり、「ロボットキャリブレーション」と呼ぶこともあります。「ハンドアイキャリブレーション」は海外で比較的よく使われる呼び方で、「(ロボット)ハンド」と「アイ(=カメラ)」のキャリブレーションを意味します。したがって、今回のようにカメラをロボットハンドではなく環境に固定設置した状態でのカメラとハンドのキャリブレーションも、「ハンドアイキャリブレーション」と呼んで差し支えありません。
ただ一方で、日本国内ではハンド手先にカメラをつけた状態を「ハンドアイ」と呼ぶこともあり、混同した状態で議論を続けると誤解を招くこともあります。この話題が出たときには双方で定義を確認すると良いでしょう。
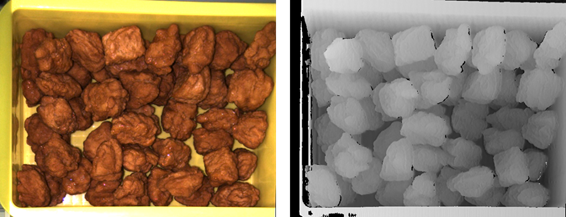
さて、これで把持姿勢が計算できるようになりましたので、Torobo Armで唐揚げピッキングをした時と同様に、Deep Learningで唐揚げを切り分けて認識し、ぶつからない把持姿勢を探索します。Deep Learningの入力はカラー画像(下図の左)、把持姿勢の探索は主にデプス画像(下図の右)を用います。
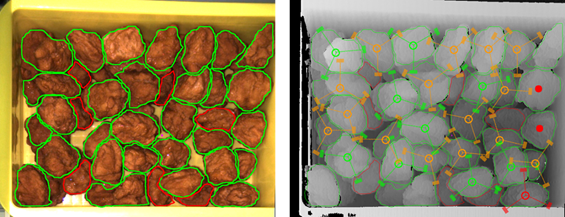
Deep Learningの認識結果を下図の左に、把持姿勢の探索結果を下図の右に示します。左図の画像の中で、緑の輪郭は信頼度高く唐揚げを切り分けられた結果、赤の輪郭は形状がいびつだったり信頼度が低かったりした結果です。右図の画像の中で緑の三又マークがピッキング可能な姿勢、オレンジは周囲とぶつかってしまうのでピッキングに失敗する可能性の高い姿勢、赤はハンドを挿入できない領域(例えば箱のふちの部分)にかかっている姿勢を意味しています。単なる赤丸は、画像の範囲外にかかってしまうなどの理由で探索自体ができなかった唐揚げです。
なお三又マークなのは、使用しているpiabのソフトグリッパが3本指だからです。三又の先端の四角がそれぞれの指が挿入される位置を示しています。緑色の探索結果は指先がきちんと隙間に入っていることが確認できます。
今回ご紹介した世界最高速のピッキングロボットを直接ご覧になりたい方は、幕張メッセで開催予定の展示会「FOODEX JAPAN 2021」(2021/3/9-12)にぜひお越し下さい。

唐揚げピッキングロボットや、3次元カメラSL40についてのお問い合わせは下記アドレスまでどうぞ。
trbe-sales[at]robotics.tokyo
それではまた。