こんにちは、トロボです。
先日スペインのマドリードで開催されたIROSに参加してきましたので、ご報告します。

開会式にはスペイン王フェリペ6世がお出ましになり、スピーチをされました。そのため、当日の朝はセキュリティチェックのため会場入口に1時間の行列ができました。

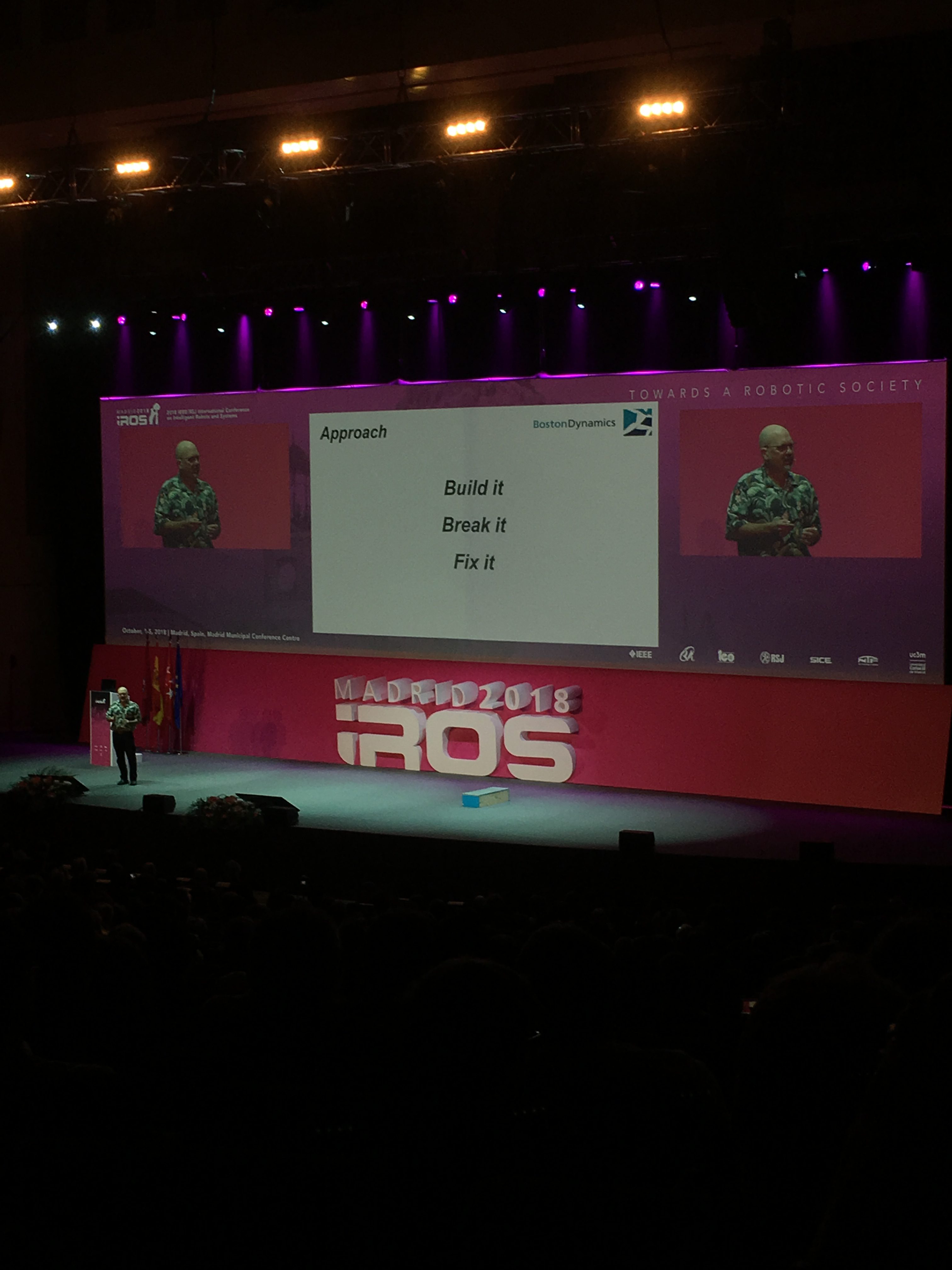
開会式に引き続き、Boston DynamicsのMarc Raibert氏が講演を行いました。よいロボットを作るには「作って、壊して、直して」のプロセスが必要ということですが、完全に同意します。悲しいことに日本のロボット研究の多くは、予算の性質上、壊すという発想がない/できないように思えます。Boston Dynamicsは、DARPAやGoogleなどから潤沢な予算が入り、どんどん壊せたからこそ「バック宙」ができる二足歩行ロボットが完成できたのではないでしょうか。
さて、テクニカルセッションのほうは専門的すぎるので、企業展示で展示されていたロボットをいくつかご紹介します。
スペインのPAL Roboticsは研究プラットフォームロボットを提供する会社ですが、2年前のICRAで見たときと比較して、ロボットのラインナップが増え、事業規模も大きくなってきたようです。


右の写真のモバイルマニピュレータは既に100台売れているそうです。ひょっとしたら研究用ロボットの分野で世界一の地位を築きつつあるかもしれません。
モバイルマニピュレータはやはりホットトピックのようで、Clearpath Robotics やRobotnikのような台車メーカが、自社の台車と他社のアームを組み合わせて研究プラットフォームとして販売しています。


それと、もう一つのホットな分野はハンドです。既に知られているロボットハンドスタートアップであるShadow RoboticsやSeed Roboticsの製品に加え、以下のようなハンドが展示されていました。
写真はqbroboticsが提供する、モータ1つで5本指をワイヤ駆動するコンプライアントハンドです。各指のグリップタイミングを機械的にずらすことで、自然な握りを実現しています。価格は7,500 ユーロとのことです。

以下はヨーロッパの公的資金で開発されたハンドで、Prensilia S.r.l.が販売しています。5個のモータで5本指を駆動するハンドです(親指2軸、薬指・小指で1軸連動)。産業用途も見据えてワイヤ駆動ではなくリンク機構にしているとのことです。

もう一つ、オークランド大学の研究成果に基づいて会社を立ち上げ中のハンドがありましたが、写真を撮り忘れました。いずれにしても、ロボットハンドが注目されている感があります。
新しい協働ロボットアームや、新しいロボティクススタートアップも立ち上がってきています。




iCubも相変わらず元気です。

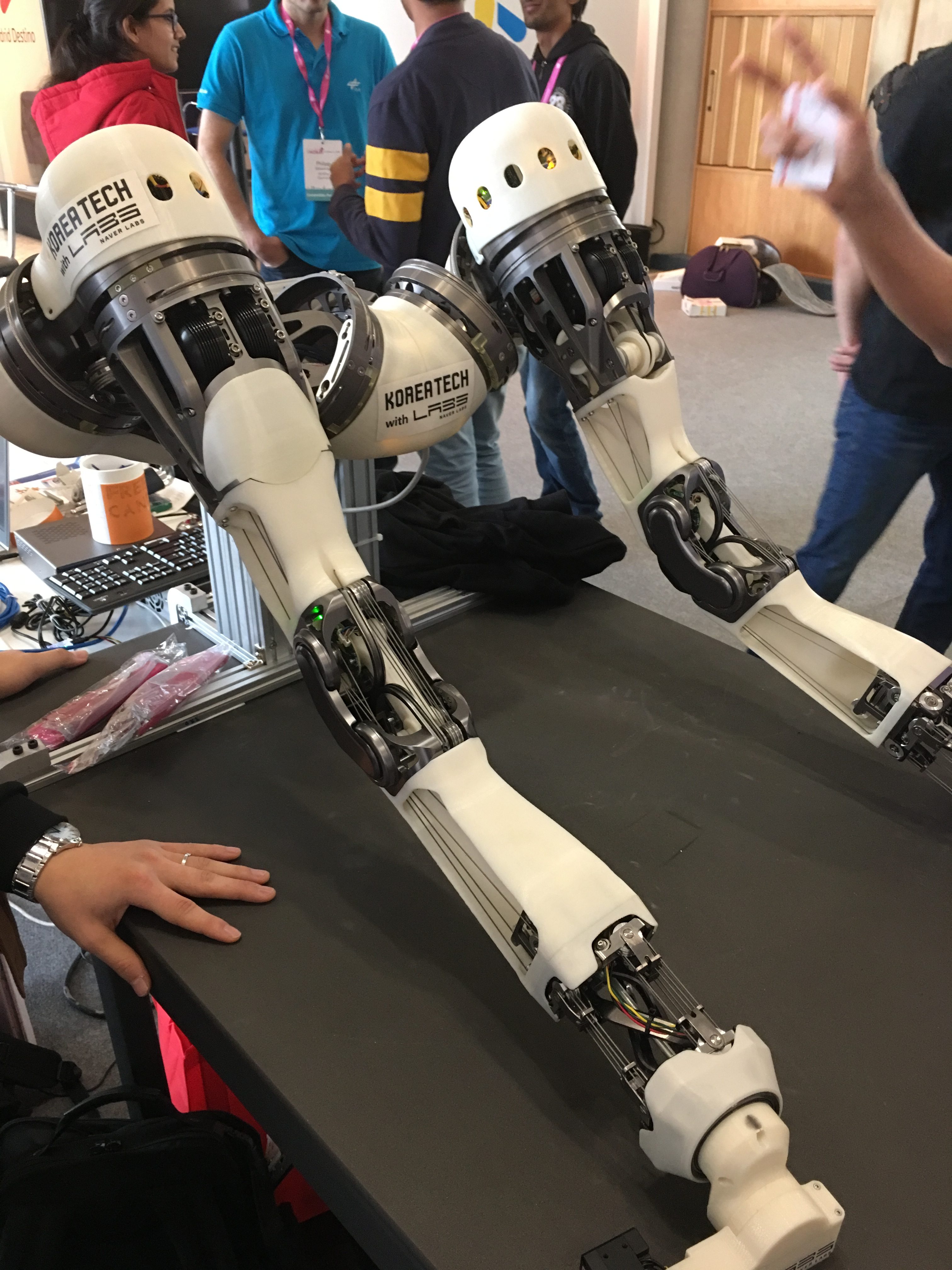
腱駆動のアームも展示されていました。Korea Techとインターネット大手Naverの研究所の取り組みとのことです。高いバックドライバビリティ・コンプライアンスを持ち、ペイロード5kg、手先繰返し精度0.1mmで、長時間使用の耐久性も問題ないとのことです。ただ、組み立てが非常に大変らしく、産業展開の課題だそうです。
日本勢としては、常連の北陽電機さんやトヨタさん(HSR)に加え、アールティさんやラピュタロボティクスさんなどベンチャー企業も展示していました。
本学会の参加者は3000人以上に上り、ディナーもスタジアムを貸し切ってのものになりました。セッションが平行し過ぎていて、聞きたい発表をまったく網羅できませんでしたが、大変盛り上がった会議となりました。来年はマカオでの開催になります。